How-to use Pika Spark’s CAN interface
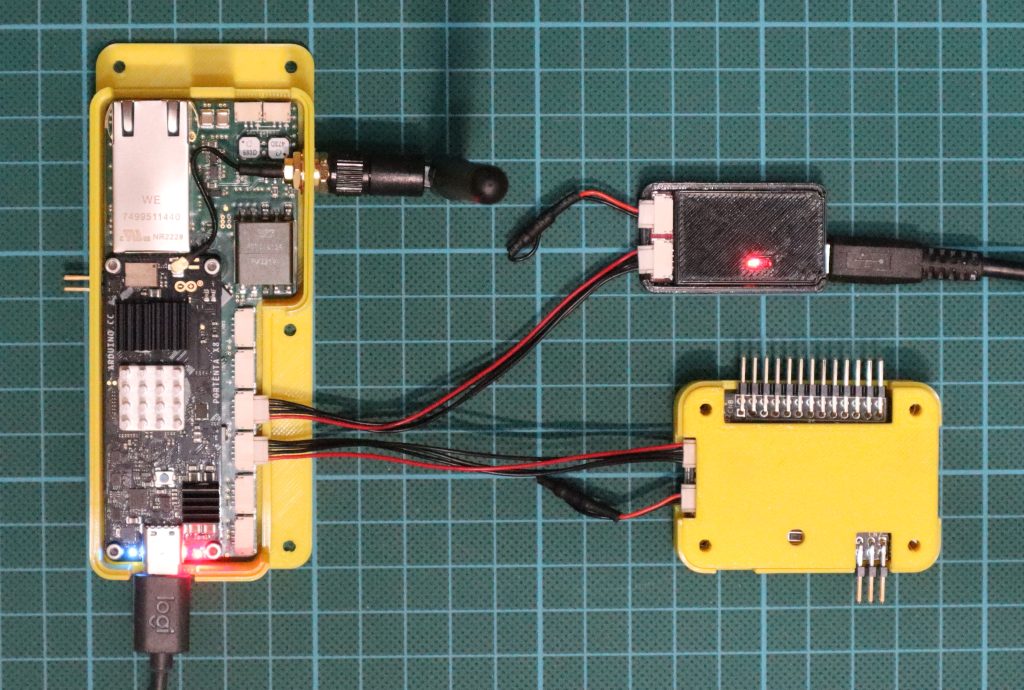
Learn how to both receive and transmit CAN frames using Pika Spark's fully galvanically isolated CAN interfaces.
Learn how to both receive and transmit CAN frames using Pika Spark's fully galvanically isolated CAN interfaces.
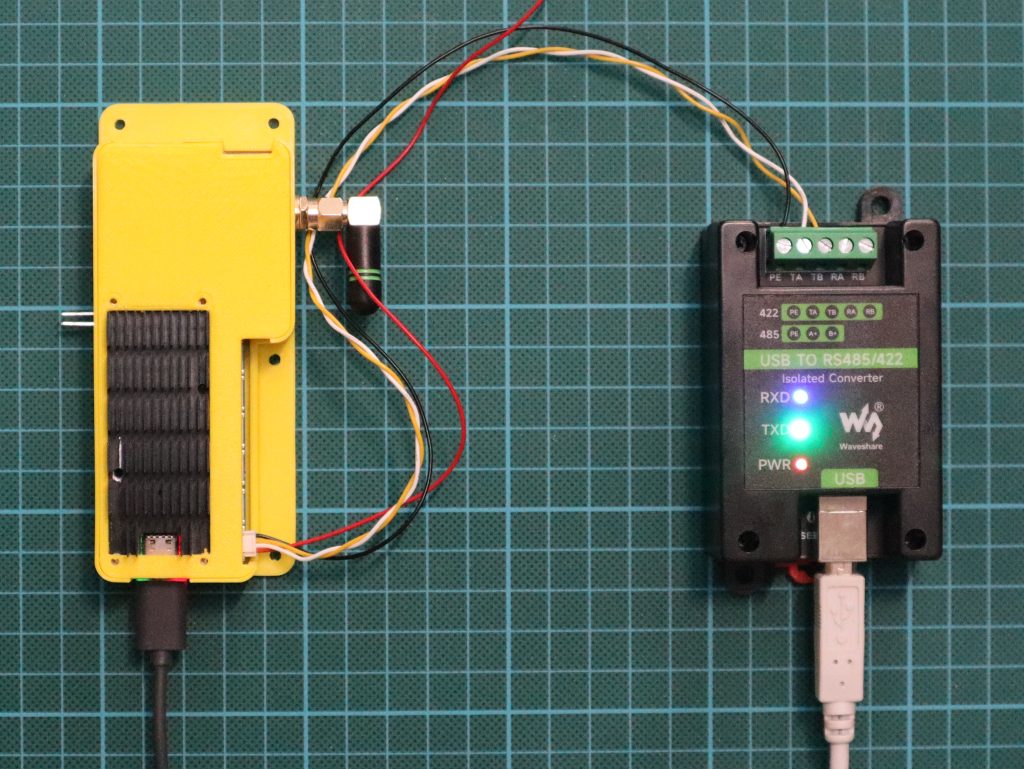
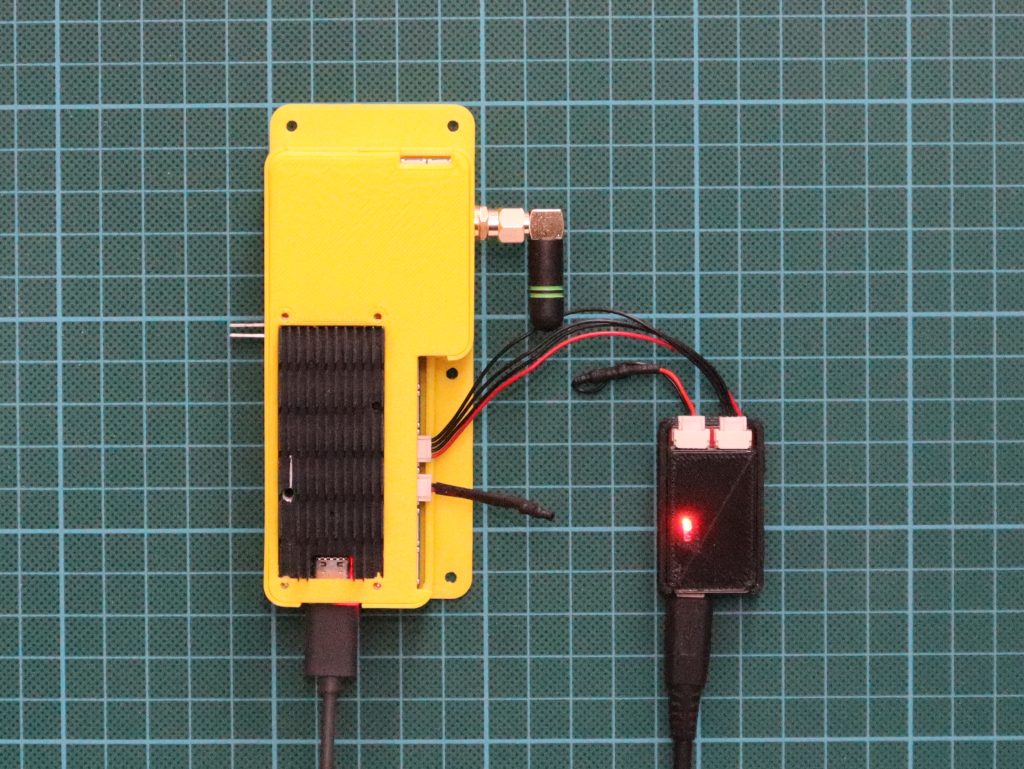
Learn how to both receive and transmit data using Pika Spark's fully galvanically isolated RS485 interfaces.
Learn how to run the OpenCyphal Yakut CLI tool - which can be used for diagnostics and debugging of Cyphal-based networks - on Pika Spark's CAN interfaces.
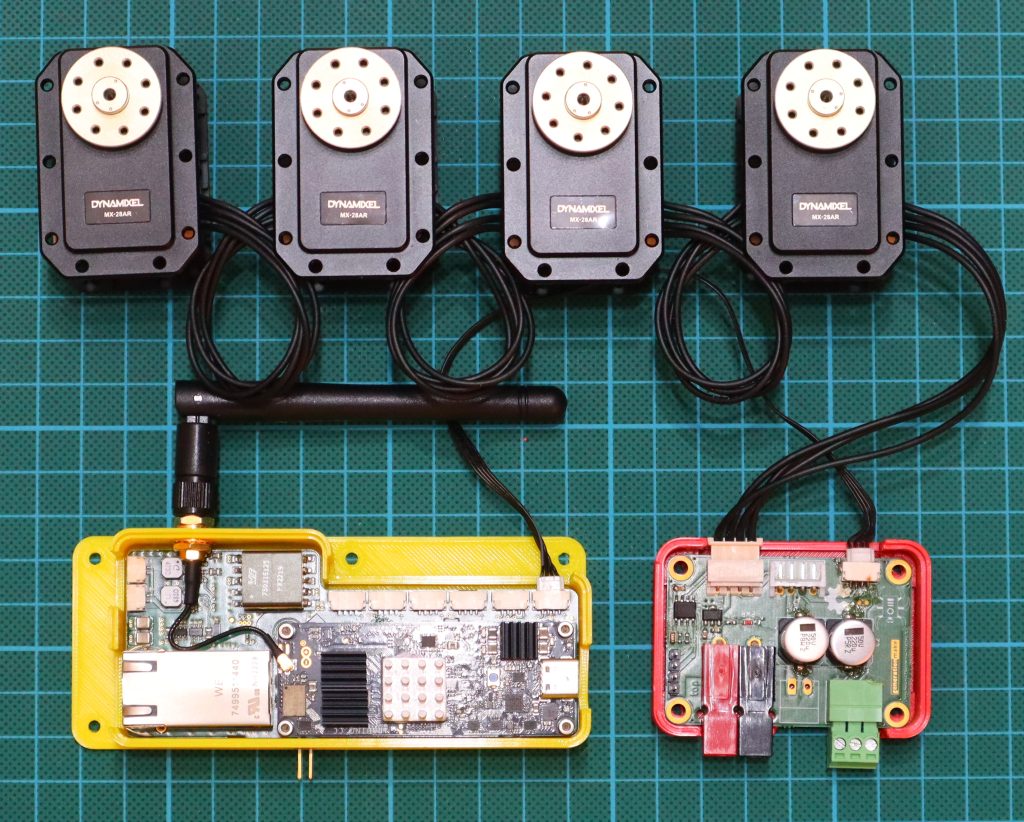
Learn how to control the widely known Robotis Dynamixel servos using Pika Spark's galvanically isolated RS485 interface. Since the RS485 interface is directly connected to the application processor a seamless control of the RS485 interface (incl. automatic setting of DATA ENABLE/RECEIVE ENABLE) is possible.
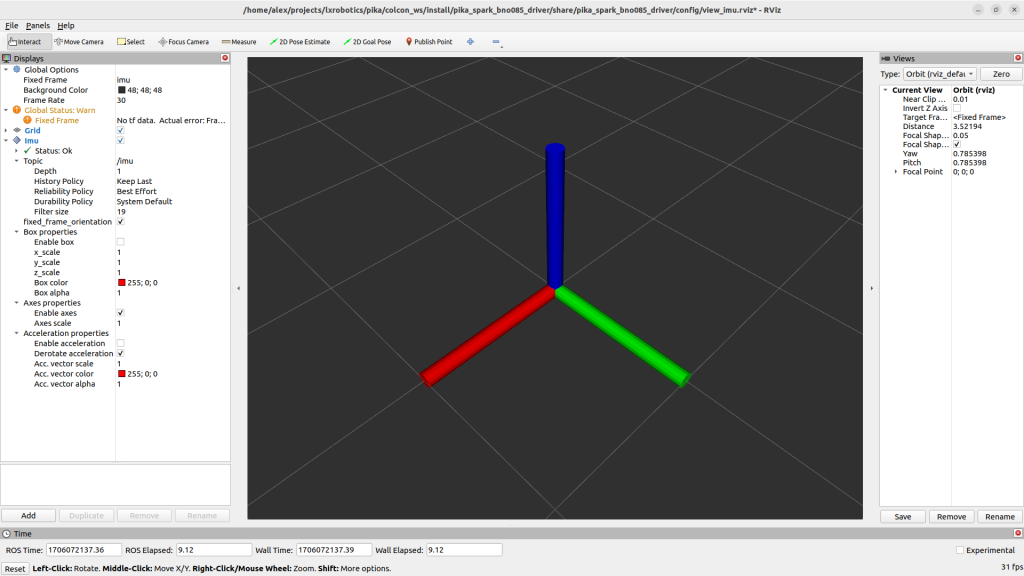
Learn how to obtain data from the powerful BNO085 9-DoF IMU via Arduino Portenta X8, convert and publish the attitude estimation as a ROS IMU message and subsequently visualize the data using ROS visualisation tools such as Rviz2.
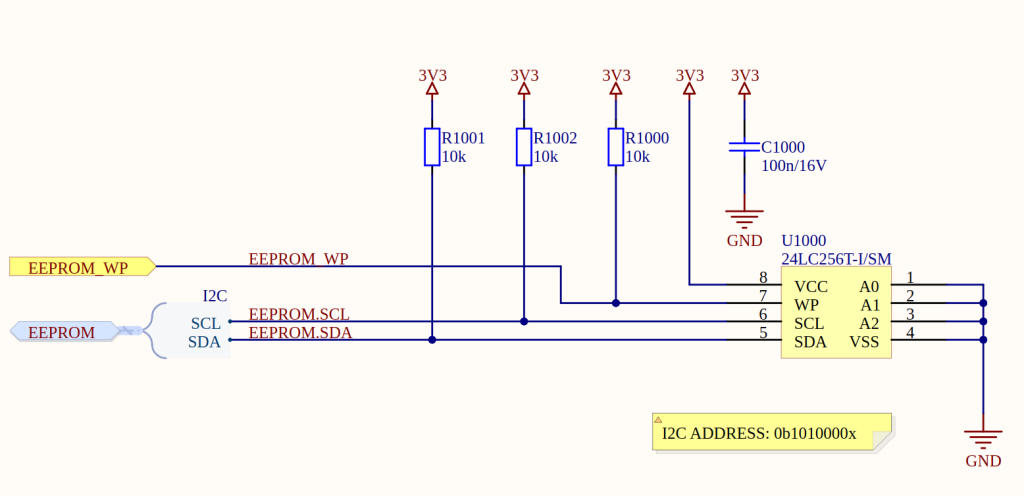
The Pika Spark contains a 256 kBit I2C EEPROM (24LC256) for storing both configuration and user data. Learn how to read data from or write data to this EEPROM using simple Docker containers.