Pika Spark is an Arduino Portenta X8 based micro robot control system combining an unprecedented amount of computing power and interfaces within an extremely small form factor. The Pika Spark has two (2) galvanically isolated RS485 interfaces which can be used for communication with external devices. Galvanic isolation prevents ground-loops and increases overall system resilience and is an important feature in industrial-grade control systems.
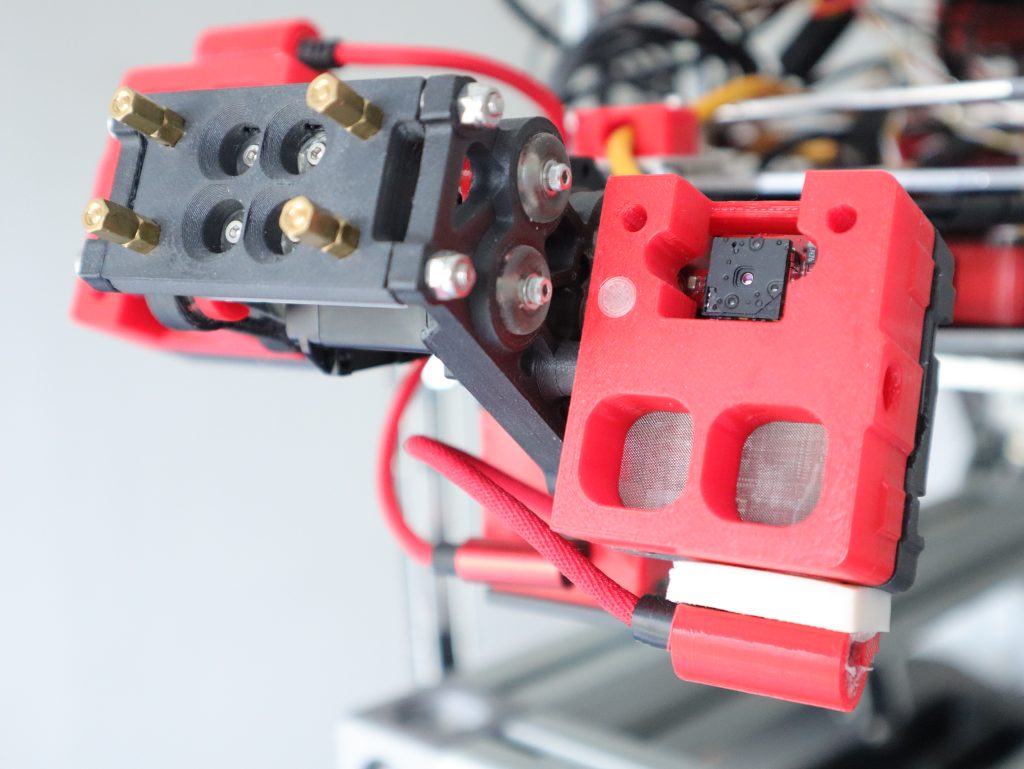
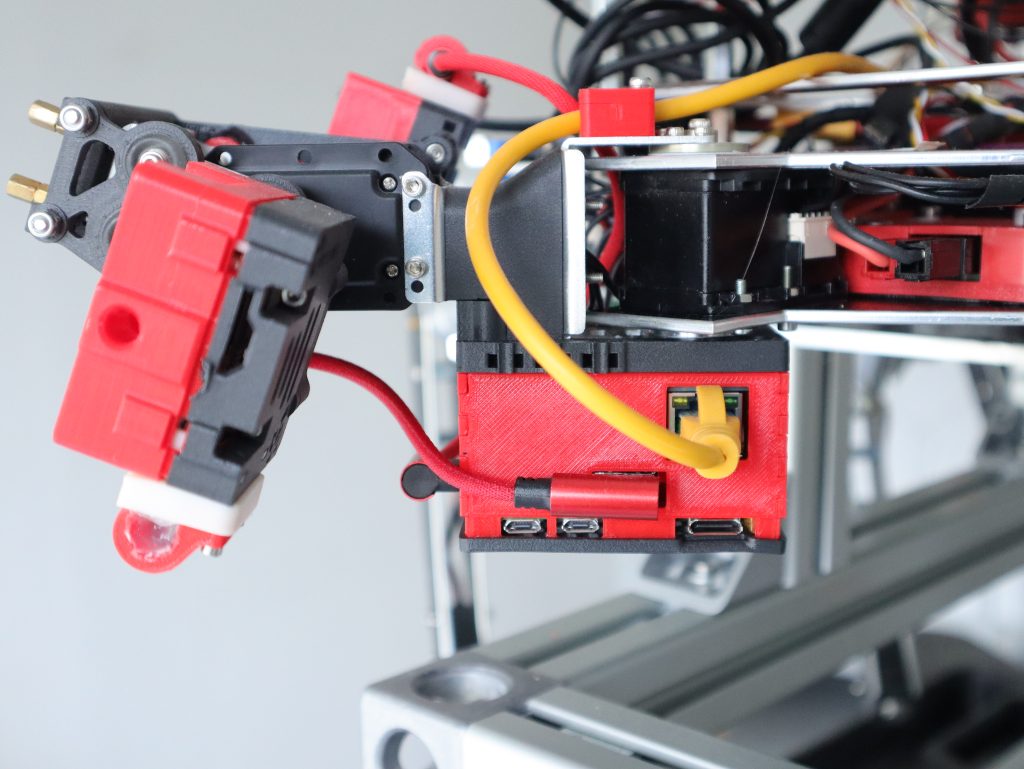
'Dragonbeard' is the unofficial name for open-software/open-hardware camera sensor head which contains both color and thermal imaging sensors from OpenMV. Those sensors are mounted on a Robotis Dynamixel MX-28AR actuated pan/tilt mechanic that allows the camera head to swivel from left to right as well as from up to down (and vice versa).
Note: The complete 3D design of the 'Dragonbeard' colour/thermal imaging head was developed and prototyped by Scott Dixon.