Pika Spark is an Arduino Portenta X8 based micro robot control system combining an unprecedented amount of computing power and interfaces within an extremely small form factor. The Pika Spark has two (2) galvanically isolated CAN interfaces which can be used for communication with external devices. Galvanic isolation prevents ground-loops and increases overall system resilience and is an important feature in industrial-grade control systems.
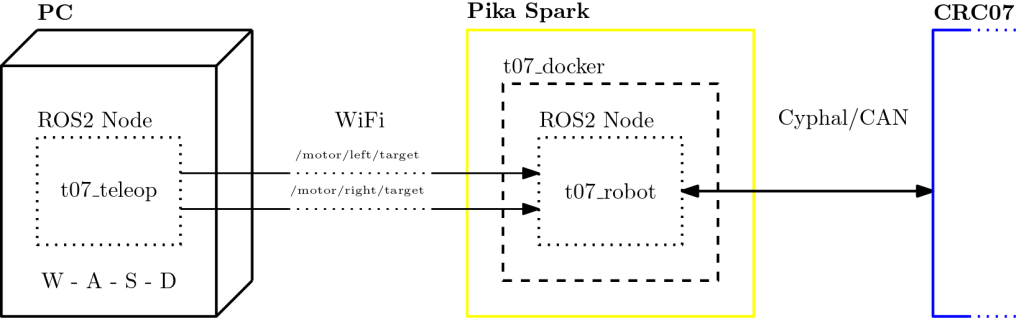
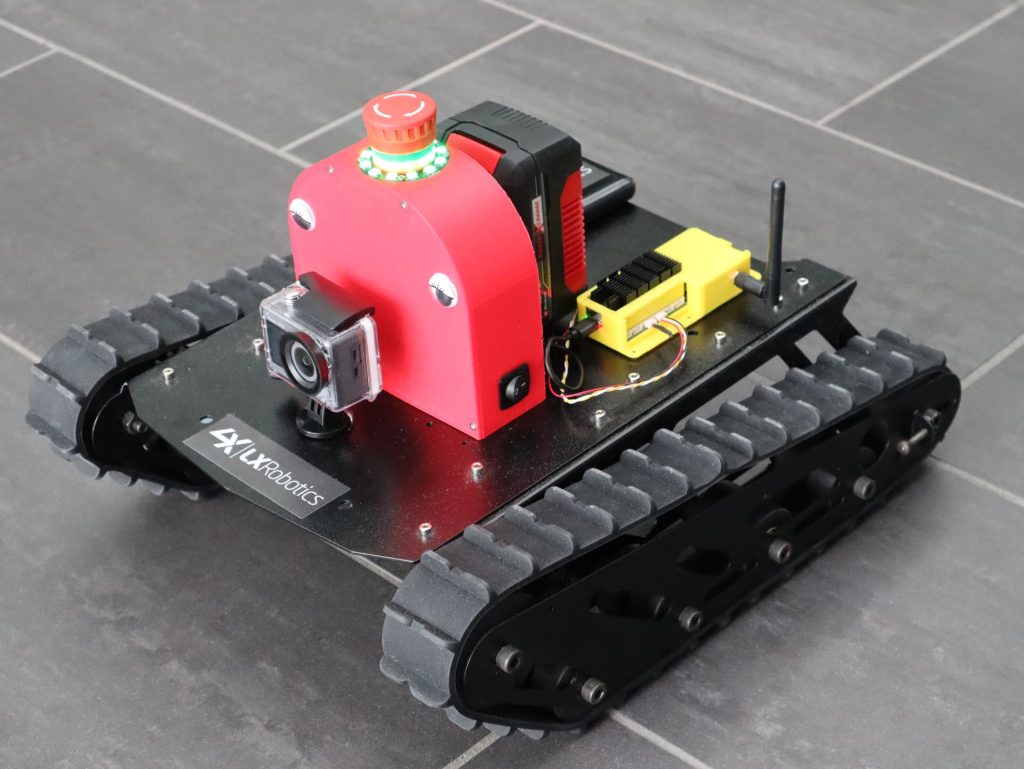
This tutorial explains how-to to use the Pika Spark's CAN interface to control various different robot types leveraging the OpenCyphal protocol: T07 - a two-wheel drive robot in a tricycle configuration, T07-4WD - a four-wheel drive robot which can be built by doubling the T07 chassis and the T07-Tracked - which is a tracked vehicle sporting two rubber tracks.