Pika Spark is an Arduino Portenta X8 based micro robot control system combining an unprecedented amount of computing power and interfaces within an extremely small form factor.
Computing
NXP i.MX 8M Mini Processor running Yocto Linux with ROS2 in Docker.
- 4 x ARM Cortex-A53 up to 1.8 GHz / core
- 1 x ARM Cortex-M4 up to 400 MHz
- 2GB low power DDR4 DRAM
- 16GB eMMC flash module
STM32H747XI Micro-Control-Unit running bare-metal firmware for real-time applications.
- Cortex-M7 core up to 480 MHz with double-precision FPU
- Cortex-M4 core up to 240 MHz with FPU
- 1 MB RAM
- 2 MB Flash
L x W x H = 101 x 42/33 x 18 mm
Industrial temperature range: -40 °C to +85 °C
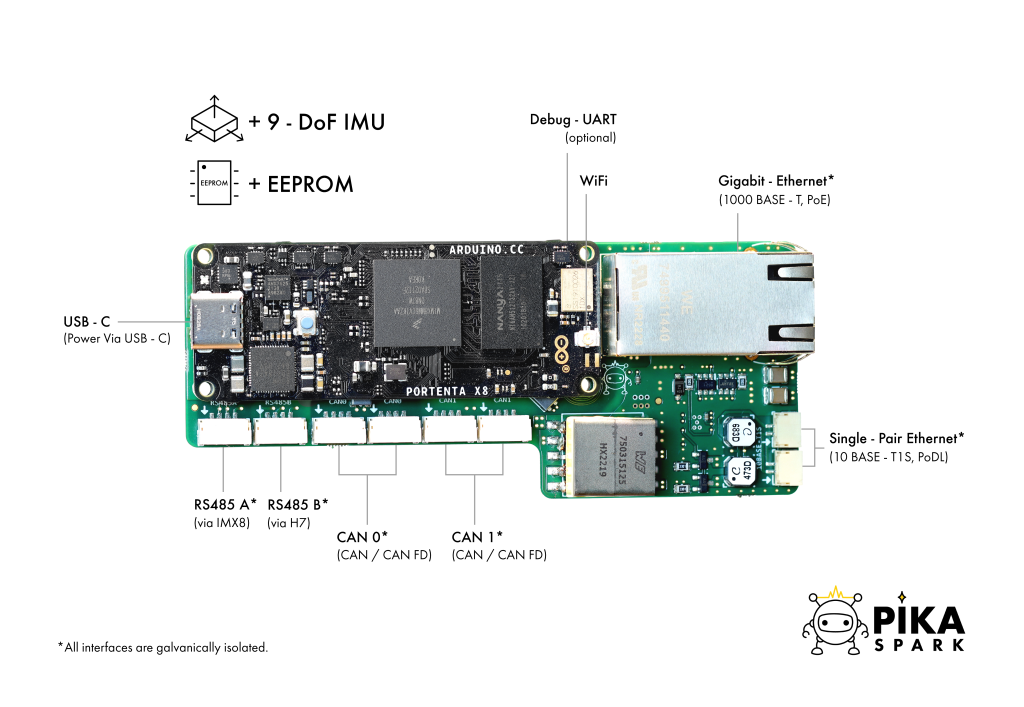
Interfaces
Industrial Wired Interfaces
All industrial wired interfaces are galvanically isolated to prevent ground-loops and increases overall system resilience.
- 2 x CAN / CAN FD (Controller Area Network)
- 2 x RS485
- Gigabit-Ethernet (1000BASE-T)
- Single-Pair Ethernet (10BASE-T1S)
Other Wired Interfaces
- Debug-UART providing a Unix shell
- USB-C for flashing the Yocto image and connecting via adb (Android Debug Bridge)
Wireless Interfaces
- WiFi (Murata 1DX)
Miscellaneous
- 9-DoF (Degree-of-Freedom) IMU (Inertial Measurement Unit)
- EEPROM for configuration storage (24LC256)
Power Supply
- Power-over-Ethernet (PoE via Gigabit-Ethernet)¹
- Power-over-Data-Lines (PoDL via Single-Pair Ethernet)¹
- USB-C
¹ Power supply via PoE and PoDL is also galvanically isolated.